
제품정보
제진대
TABLE TOP TYPE
RST Series
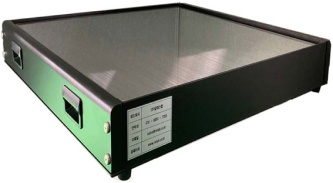


주요사양
**주문사양 제작 가능
| 모델 | RST |
|---|---|
| 고유 진동수 | 수직 : 2.5Hz ~ 3.0Hz |
| 제진 방식 | High Precision Diaphragm Air Spring |
| 감쇠 방식 | Air Damping by Orifice |
| 레벨링 형식 | Auto Leveling System by 3-Point Leveling Valve |
| 상판 재질 | 고강성 Steel 강판 또는 Honeycomb 구조 사용 |
| 최대 허용 하중 (Kg) | 150 |
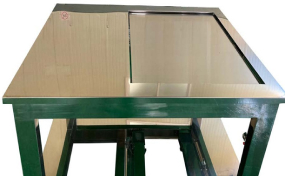
GENERAL TYPE
RGS Series



주요사양
**주문사양 제작 가능
| 모델 | RSG5060 | RSG7090 | RSG9090 |
|---|---|---|---|
| 고유 진동수 | 수직 :1.2 ~1.5 Hz / 수평 : 2.0 ~ 2.5Hz | ||
| 제진 방식 | High Precision Diaphragm Air Spring | ||
| 감쇠 방식 | Air Damping by Orifice | ||
| 레벨링 형식 | Auto Leveling Systemby 3-Point Leveling Valve/ Repeatability: ±0.1mm | ||
| 상판 재질 | 고강성 Steel 강판 / Honeycomb 구조사용 | ||
| 최대 허용 하중 (Kg) | 250 | ||
| Operation | 3.2 ~ 6.0 kg/cm2 압축 공기 또는 질소 가스 | ||
DESK TYPE
RSD Series

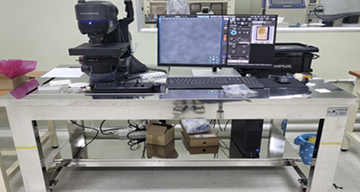
주요사양
**주문사양 제작 가능
| 모델 | RSD | ||
|---|---|---|---|
| 고유 진동수 | 수직: 1.2 ~ 1.5 Hz / 수평: 1.5 ~ 1.8 Hz | ||
| 제진 방식 | High Precision Diaphragm Air Spring | ||
| 감쇠 방식 | Air Damping by Orifice | ||
| 레벨링 형식 | Auto Leveling System by 3-Point Leveling Valve / Repeatability : ±0.1mm | ||
| 상판 재질 | 특수 코팅된 멜라민 상판 또는 허니콤 상판 사용 | ||
| 제진 영역 (mm) | 500 x 700 | 700 x 900 | 500 x 800 |
| 최대 허용 하중 (Kg) | 250 | ||
| Operation | 3.2 ~ 6.0 kg/cm2 압축 공기 또는 질소 가스 | ||
LOW PROFILE
RSL Series
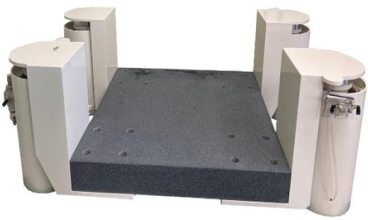
Cradle Platform Type

Base Platform Type

주요사양
**주문사양 제작 가능
| 모델 | RSLC Series | RSLB Series |
|---|---|---|
| 고유 진동수 | 일반 타입: 1.0~ 1.2Hz (수직)/ 1.5~ 1.8 Hz(수평)/ 특수 타입: 0.7~ 1.0Hz (수직)/ 1.0 ~1.2 Hz(수평) | |
| 레벨링 형식 | Auto Leveling System by 3-Point Leveling Valve / Repeatability: ±0.1mmor ±0.01mm | |
| Vibration Isolation | PneumaticIsolation Type | |
| 상판 재질 | 정반, 하니콤 및 적층구조의 전도성 파일 상판 / Frame: Steel, AI, Stainless | |
| 최대 허용 하중 (Kg) | 800 | |
| Operation | 3.2 ~ 6.0 kg/cm2 압축 공기 또는 질소 가스 | |
Active Anti-Vibration System
RSA Series

주요사양
**주문사양 제작 가능
| 모델 | RSA-0405 | RSA-0506 | RSA-0607 | RSA-0708 |
|---|---|---|---|---|
| 사이즈 (mm) | 396 x 496 x 110 | 496 x 596 x 110 | 596 x 696 x 125 | 696 x 796 x 125 |
| 무게(Kg) | 23 | 37 | 65 | 85 |
| 적재 하중 (Kg) | Max. 60 | Max. 150 | Max. 200 | Max. 300 |
| 상판 종류 | 알루미늄 (기본) / H-6 Optical Board (옵션) | |||
| 제어 주파수 (Hz) | 0.5 ~ 1,000 | |||
| 제어 자유도 | 3축 6자유도 제어 (Full Active System) | |||
| 용도 | 탁상형 능동형 제진 시스템 | 고하중의 나노 계측기용 능동형 제진 시스템 | ||